
Conduzimos motos com cada vez mais eletrónica, controlada e gerida por unidades de controlo e sensores. Vamos tentar nos orientar e entender melhor este mundo.
Um super computador sobre rodas

IMU, plataforma inercial, acelerómetros giroscópios, unidades de controle. Já estamos acostumados a ouvir esses nomes sempre que falamos em motos. Não é necessário que seja uma superdesportiva, porque hoje em dia até as motos naked, maxi enduro e de média cilindrada estão cada vez mais equipadas com o que poderíamos considerar “eletrónica avançada”. Mas como é feita a plataforma inercial e como funciona e como intervém na moto? Vamos tentar entendê-lo passo a passo.
O Ride By Wire

Também chamado de acelerador eletrónico, foi o primeiro passo em direção à eletrónica de controle avançada. No passado a ligação entre o acelerador e os aceleradores era direta, via cabo (e este ainda é o caso de muitas motos/scooters) para que cada movimento do acelerador correspondesse a um movimento igual do acelerador.
Esta solução nem sempre é a correta, pois às vezes (como quando o motor funciona em baixas rotações) ao abrir totalmente o acelerador você corriamos o risco de “afogar” o motor que não ofereceria o desempenho ideal, aumentando o consumo e as emissões entre outras coisas.


Desde a chegada da injecção electrónica, os engenheiros têm tentado remediar esta situação, adoptando primeiro sistemas de aceleração dupla (uma ligada mecanicamente, a outra gerida electronicamente) e depois passando para o sistema ride by wire, que proporciona uma gestão completamente electrónica da aceleração. Esta solução permite oferecer sempre a dose de binário perfeitamente calibrada de acordo com as necessidades de aceleração e as condições do piso da estrada.
A chegada do Ride By Wire abriu um mundo novo para os técnicos: o mapeamento do motor e o controle de tração trabalham em conjunto com o Ride By Wire, depois foi adicionada a plataforma inercial que possibilitou gerenciar a entrega de potência não apenas com base na superfície da estrada, mas também no ângulo da dobra. O acelerador sem cabo também é útil para “ajudar” o downshifter (a caixa de velocidade eletrónica que funciona na redução da mudança) durante a redução de velocidade e para limitar a travagem do motor. Se não fosse o Ride By Wire, muitas das funções que temos hoje nas nossas motos nunca teriam sido criadas.
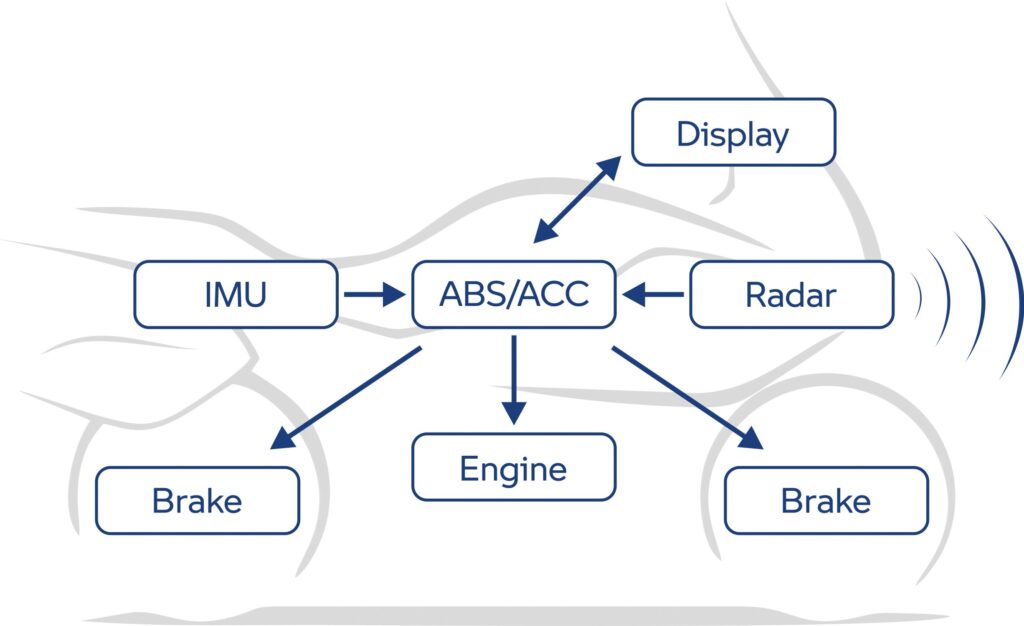
Os sensores

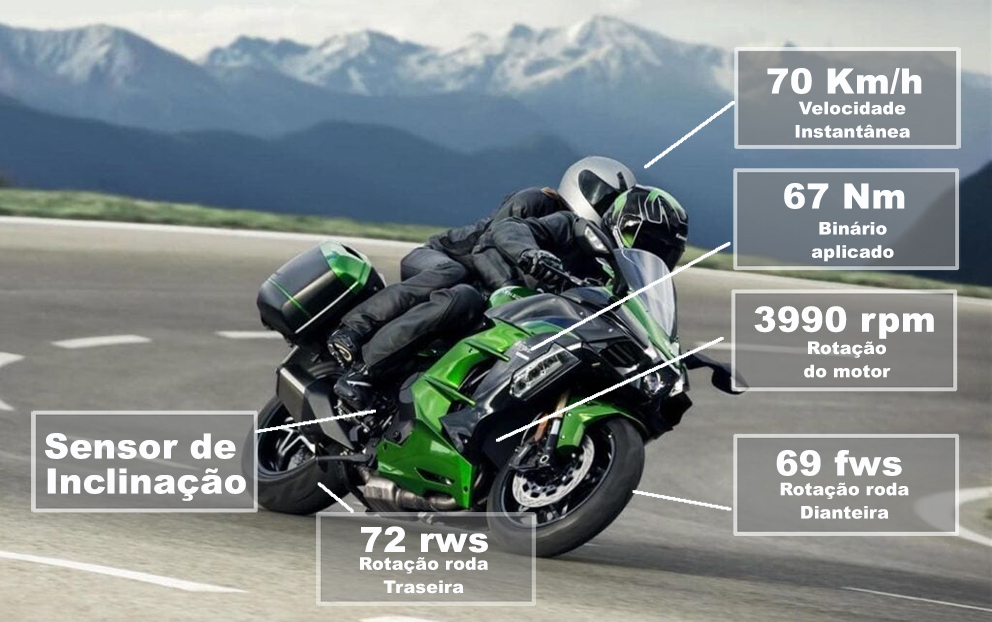
O “coração” de todo sistema eletrónico é composto pela plataforma inercial e pela unidade de controle, os “olhos” são os sensores agora colocados em todos os lugares da moto , os “nervos” são os cabos que transportam os sinais detectados pelos sensores até a unidade de controle. Os sensores agora detectam tudo o que acontece na moto, desde a velocidade de rotação das rodas (para ABS e controle de tração) até as temperaturas do ar e do líquido refrigerante e finalmente até as excursões das suspensões (quando há suspensões eletrónicas) – tudo isso são dados que são enviados à central que os processa em milésimos de segundo e decide como intervir nos parâmetros de ignição por injeção e na abertura do acelerador (independentemente de quanto o utilizador esteja a abrir o acelerador), para oferecer o melhor possível desempenho. Obviamente, quanto mais sensores houver na moto, mais a central terá informações essenciais para fazer a moto e todos os seus controles funcionarem com “precisão”.
A plataforma inercial
É o último elemento, aquele que faltava na central para saber tudo sobre a moto. No final das contas, para simplificar bastante as coisas, é o mais avançado dos sensores porque na verdade a plataforma inercial (Unidade de Medição Inercial IMU) mede a posição da moto no espaço, e as acelerações/desacelerações a que está sujeita. Para isso, utiliza um ou mais giroscópios (um giroscópio é um sistema giratório em altíssima velocidade) e outros tantos acelerómetros.
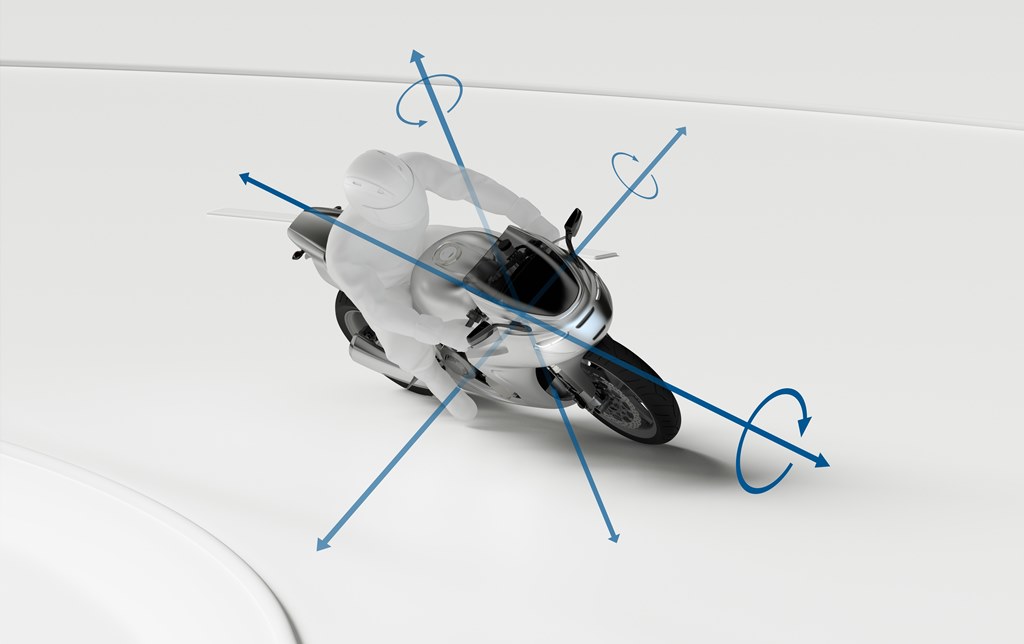
Mais o que significa medir a posição da moto no espaço? Significa simplesmente detectar a cada fração de segundo as inclinações da moto (curvas, mas também quaisquer cavalinhos) e também a extensão da aceleração ou travagem, sendo todos estes dados comunicados à unidade de controlo que, combinando-os com os recebidos dos sensores, desenvolve o que é chamado de “estratégia” para a produção do motor. Conhecer a posição da moto é fundamental para ter controles mais refinados do que no passado, por exemplo controle de tração e ABS que portanto podem funcionar também em relação ao ângulo de inclinação, e ultimamente também as suspensões ativas.
Na prática, o motor, independente da abertura do acelerador, oferecerá menos torque e potência se a moto estiver muito inclinada, aumentando-os à medida que o ângulo de inclinação diminui. As plataformas inerciais mais complexas têm mais giroscópios e mais acelerómetros (geralmente um para cada eixo) que medem as inclinações direita-esquerda (ângulos de inclinação), para frente e para trás (o chamado pitch) e nas evoluções mais recentes também o derrapar da moto.
Um sistema complexo que exige muitos testes
Projetar e desenvolver uma moto equipada com eletrónica avançada leva muito tempo. Porque quanto mais informação houver, mais complicado será combiná-la para garantir um funcionamento perfeito. Muito trabalho é feito no computador com simulações e no banco de testes, mas nada consegue reproduzir a condução real na estrada. Por esta razão, o trabalho do piloto de testes tornou-se ainda mais longo, mais complexo e é essencial para reproduzir a sensação de condução perfeita e garantir que as reações da moto sejam as mais “naturais” possíveis.
Milhares de quilómetros a percorrer em estrada e pista para definir o “perfeito” entre milhares de mapas. Na realidade, não existe um mapeamento perfeito, a eletrónica da moto está em constante evolução, os refinamentos nunca param e não é incomum (na verdade frequente) que, uma vez na oficina para um serviço, a moto também receba mapeamentos atualizados. Um verdadeiro “upgrade” como aquele que recebe no seu computador ou smartphone.
Alguns termos que convém memorizar:
Unidade de Medição Inercial IMU – Plataforma inercial que mede continuamente acelerações e inclinações da moto
ROLL – É o movimento perpendicular ao eixo da moto (direita-esquerda)
PITCH – É o movimento ao longo do eixo da moto (frente-trás).
CORNERING ABS – É o movimento lateral da roda traseira em comparação com a dianteira. Na prática funciona em relação à inclinação da moto, evitando que a roda trave quando a moto estiver inclinada e os travões estão acionados. Funciona acoplado à plataforma inercial. Em algumas motos chama-se SENSORES MSC : são os olhos do sistema eletrónico, aqueles que detectam todos os dados de temperatura, velocidade, deslocação e pressão dos diversos elementos mecânicos da moto.
UNIDADE DE CONTROLE – É o verdadeiro cérebro da moto, recebe todos os dados dos sensores e da plataforma inercial (se presente) e processa-os para gerenciar todos os parâmetros do motor e controles eletrónicos.
MAPEAMENTOS – Também podem ser definidos como modos de pilotagem e contêm um conjunto de configurações para a resposta do motor e os diversos controles eletrónicos.













{kind=link}